Trilobot has remote control!
"The greatest enemy of knowledge is not ignorance, it is the illusion of knowledge." - Stephen Hawking

Over the last two weeks the club and club leaders have been busy working on making sure all robots have remote control, so when we decide what robot we use, we know how to code it. This has also helped the younger members of the club learn more about how libraries in python work.
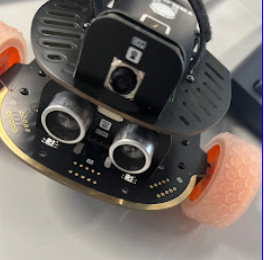
Today we got the Trilobot moving for the first time by remote control. To control the robot we used a PS4 controller. Once the robot was moving, we needed to work out how to get the pi to run this script on boot and use the right controller mappings type so the inputs could be read.
To get the script to run on boot, we used "crontab -e" and put a line in the document that used the "@reboot" event. The next step of getting the robot to use the right controller mapping types was abit trickier, however after a quick read of the documentation from some of the team members, we discovered that the line "controller = controller_mappings.choose_controller()" could be replaced with "controller = controller_mappings.create_ps4_wireless_controller()".We discovered that the robot had trouble on moving onto different surfaces if they are not on the same level due to the steel ball at the back. We will work on this next time and this may even require using 4 wheels instead.